Vision info is used to navigate the robot gripper to a target in free space, and when it gets very close to the target and gets in contact with the target, the contact forces/torques are used to adjust position precisely.




Vision info is used to navigate the robot gripper to a target in free space, and when it gets very close to the target and gets in contact with the target, the contact forces/torques are used to adjust position precisely.
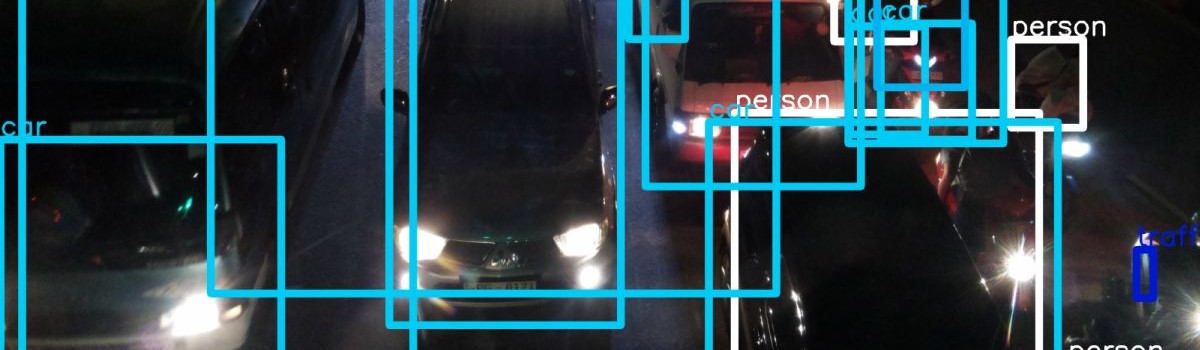
Machine learning on deep neural network, with vehicle classification, tracking and counting are all lines up to determine realtime traffic intensity and then to adjust signal timing. Traffic modeling was carried out using actual traffic counts. Signal timing adjustment was silulated on “SUMO”. first the…
AbRuTeCh, the traffic analysis tool uses machine learning and deep neural networlks on a Jetson to identify, classify and count them. Vehicle tracking and speed measurements are also included. User can draw lines on his own video and get the speeds and vehicle statistis calculated…
Edge pixel count, corrected for road marks and other parasitic edges can be representative to traffic intensity on a scale 0-5. Even wothout identifying vehicles, classifying and counting them, total edge pixel count indicates traffic intensity with a reasonable accuracy.
Monitoring Unplucked Areas in a Tea Plantation HSV processing differentiates unplucked area from plucked area as seen here for CV-90 tea cultivar
NBIoT Collor for Tracking and Behavior Monitoring of Elephants This collar has a NBIoT (Narrow band IoT) transponder which sends position (GPS) and orientation/motion information of the elephant to a cloud server. Elephant Localization using Infrasonic Rumbles
AC Energy Saving System Existing split-type multy unit AC systems in supermarkets can be centrally controlled with this modification which measures temperature and humidity at strategic locations without wasting electricity unnecessarily. It has shown a 10% energy saving over one year operation.
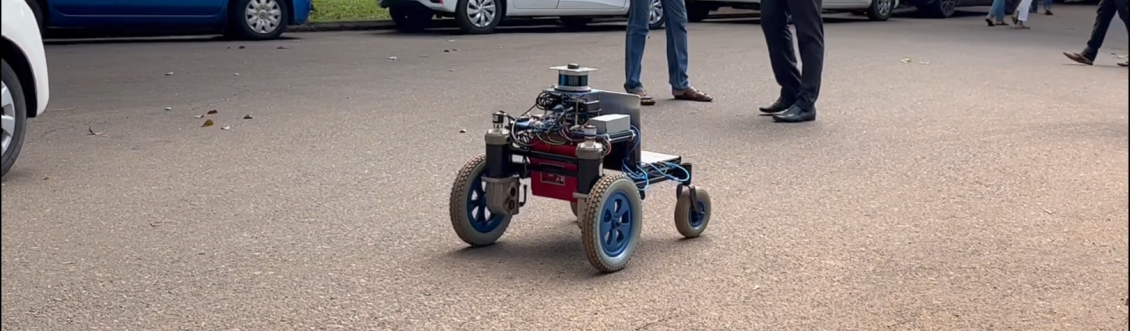
A new 5-3-5 spline trajectory planning algorithm is tested for reduced jerk at via points.
Underwater Robot Surface Vehicle
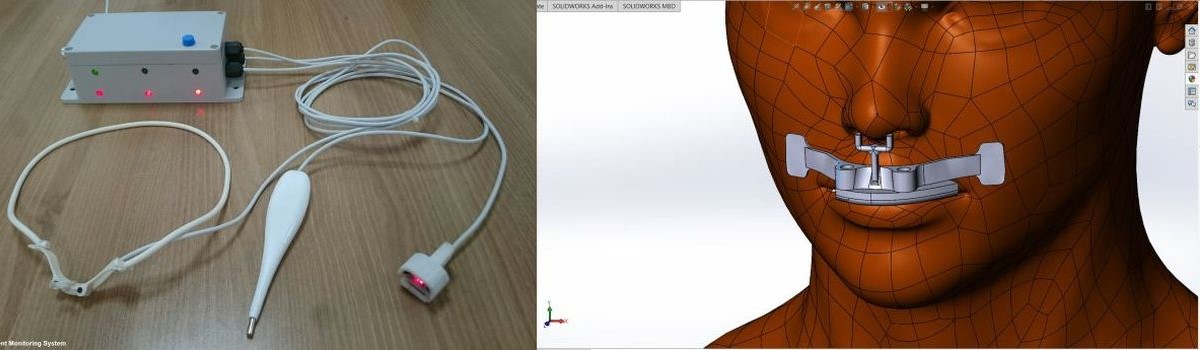
This robot helps doctors to get close to infectious patients for examination.